projects by
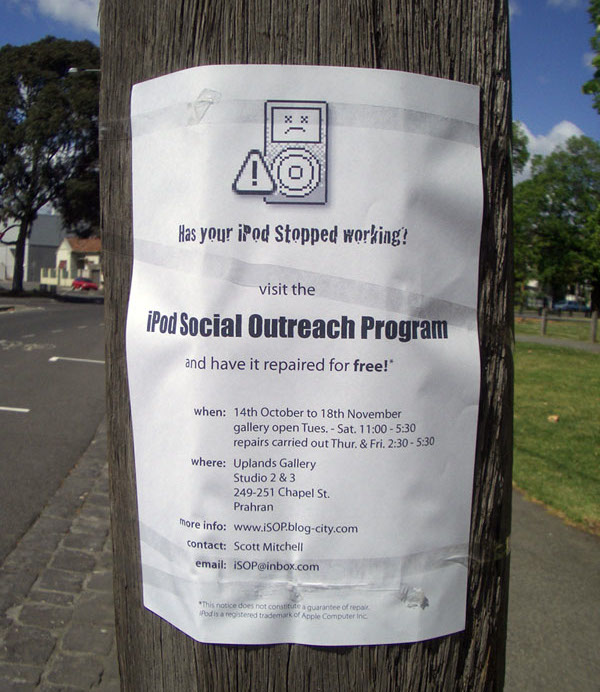
Scott Mitchell